Araştırmacılar, ışıkla uyarıldığında tetiklenen nöromusküler doku aracılığıyla hareket eden hassas biyohibrit robotik cihazlar geliştirdiler. Böylelikle makine mühendisliği, otonom biyobotlar geliştirmeye bir adım daha yaklaşmış oldu.
2014 yılında, Illinois Üniversitesi ‘ndeki mekanik bilimi ve mühendisliği profesörü Taher Saif’in ve biyo mühendislik profesörü Rashid Bashir’in liderliğindeki araştırma ekipleri; Sıçanlardan türetilen faal kardiyak kas hücreleri ile çalışan, kendi kendine hareket etme özelliği olan ilk biyohibrit yüzme ve yürüme biyobotlarını geliştirmek üzere birlikte çalıştılar.
Saif, “İlk yüzücü biyobot çalışmamız, sperm hücreleri baz alınarak modellenmiş botların esasında yüzebileceğini gösterdi.” dedi. Ve şu eklemeyi yaptı: “Bu kuyruklu bot nesli, kendi başına atım yapan kalp dokusunu kullandı, ancak botlar çevreye duyarlı değillerdi. Ve herhangi bir karar veremediler.”
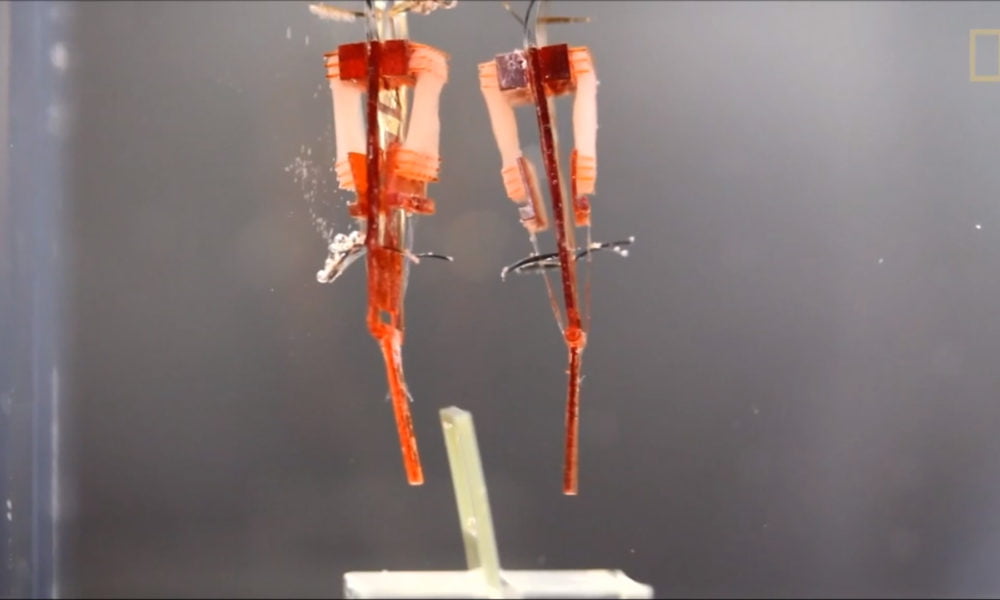
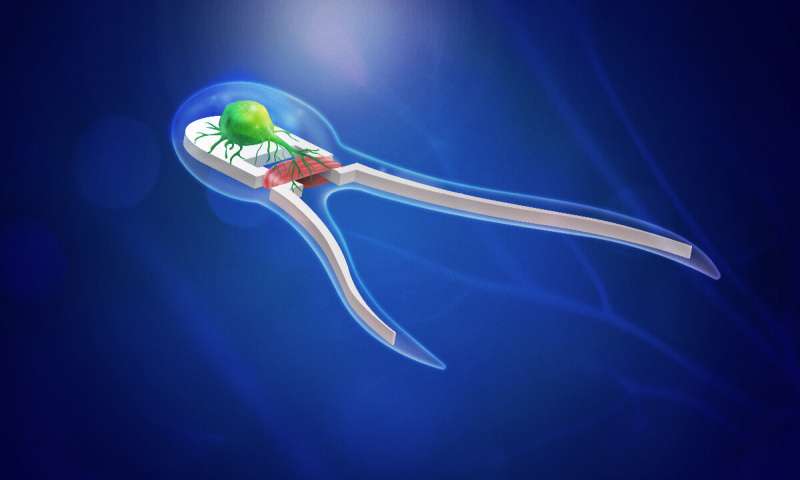
Saif tarafından yönetilenve Ulusal Bilimler Akademisi’nin bildirilerinde yayımlanan yeni bir çalışmada araştırmacılar; Üzerlerinde yer alan motor nöronlar tarafından uyarılan ve iskelet kası dokusuyla hareket kabiliyetine ulaşan iki kuyruklu yeni nesil biyobotlar ortaya koydular. Nöronlar optogenetik özelliklere sahiptir.Işığa maruz kaldıklarında nöronlar, kasları harekete geçirmek üzere uyarılmış olurlar.
Kas dokusuyla ilintili
Saif, “Kas dokusuyla ilintili fare kök hücrelerinden türetilmiş bir optogenetik nöron hücre kültürü uyguladık.” diye konuştu. Ayrıca: “Nöronlar kaslara doğru ilerledi ve nöromusküler bağlantı noktaları kurdu. Ve böylelikle yüzücü botun bileşenleri, kendi başlarına bir araya gelmiş oldu.”
Nöromusküler dokunun,geliştirdikleri sentetik biyobot iskeletleriyle uyumlu olduğunu tasdik etmelerinin ardından ekip, yüzücü botun kabiliyetlerini optimize etmek üzere çalıştı.

Saif, “Hangi fiziksel özelliklerin en hızlı ve en verimli yüzmeye imkân tanıyacağını belirlemek için mekanik bilimi ve mühendisliği profesörü Mattia Gazzola liderliğinde hesaplamalı modeller kullandık.” dedi
Ayrıca takiben: “Örneğin, biyo-yüzücünün en verimli tasarımı için kuyruk ve kuyruk uzunluğundaki değişiklikler üzerine çalıştık.” açıklamasında bulundu.
Gazzola, “Biyolojik aktüatörlerin, diğer bir deyişle biyobotların, diğer teknolojiler kadar tekâmül etmediği göz önüne alındığında, çok büyük kuvvetler üretemedikleri görülüyor. Bu, onların hareketlerini kontrol etmemizi zorlaştırıyor.” diyerek:
“Teknolojiden en iyi şekilde faydalanarak biyobotlara hareket işlevlerini kazandırmak üzere, biyobotların geliştirilecekleri ve birbirleriyle etkileşime girecekleri bir platformu dikkatlice tasarlamak çok önemlidir.
Çalıştırdığımız bilgisayar simülasyonları, çok sayıda olası tasarımı görebilmemize ve bunların arasından gerçek hayatta test edilmek üzere en makul olanları belirleyebilmemize olanak tanıması itibarıyla bu anlamda kritik bir rol oynamaktadır.” eklemesini yaptı.
Biyohibrit sistemler dahilinde daha fazla entegre olmasının önünü açıyor.
Saif, “Kas aktivitesini nöronlarla harekete geçirme yetisi, sinir birimlerinin biyohibrit sistemler dahilinde daha fazla entegre olmasının önünü açıyor. Hayvanlardaki sinir kontrolü anlayışımız göz önüne alındığında, biyohibrit nöromusküler tasarım ile sinir ağlarının hiyerarşik bir organizasyonunu kullanarak botlardaki hareket kabiliyetini ileri taşımak mümkün kılınabilir.”diye konuştu.
Saif, kendisinin ve ekibinin bu ilerlemenin; biyo-mühendislik, tıp ve kendi kendini iyileştirme materyalleri teknolojilerindeki uygulamalar için çevresel ipuçlarına akıllıca yanıt verebilme becerisine sahip, çok hücreli canlı sistemlerin geliştirilmesine öncülük edeceğini düşündüğünü belirtti.
Bununla birlikte ekip, -canlı organizmalarda olduğu gibi- iki biyohibrit makinenin tamamen aynı olamayacağını kabul ediyor.
Saif, “İkizlerin tamamen aynı olmadığı gibi, aynı işlevi gerçekleştirmek için tasarlanan iki makine de tamamen aynı olmayacak.”
“Biri daha hızlı hareket edebilir veya meydana gelen bir hasarı diğerinden farklı şekilde iyileştirebilir -ki bu da yaşayan makinelerin benzersiz bir niteliğidir.”.
Bunlar da ilginizi çekebilir:
- Kendiliğinden Hareket Eden Haplar İğnelerin Sonu Olabilir
- MIT Araştırmacıları İğneyi Otonom Hapa Dönüştürdü
- Beyin Damarlarından bile Geçebilecek Robotik İplik Tasarlandı
Editör / Yazar: Özgür ÜLKER