Robotların, tasarlanan modeller sayesinde kalıp malzemelerin şekillenebilmesini sağlayabilmeleri dışında, sıvı ile katı nesnelerin etkileşime girme konusunda da gelişme kaydettiği görülmekte.
Yeni bir öğrenme sistemi geliştiren MIT araştırmacıları sayesinde, robotların katı nesneler ile sıvıların etkileşimleri hakkında tahminde bulunma yetenekleri ve malzemelerin istenilen hedef şekillere dönüşebilmesinin sağlanması gelişiyor. Öğrenme tabanlı parçacık simülatörü gibi bilinen sistem, endüstriyel robotlara işlenebilmiş bir dokunuş sağlayabilir. Ayrıca kişisel robotlarda kil şekillendirme ya da suşi için yapışkan pirinçleri yuvarlamayı modellemek gibi eğlenceli uygulamalara olanak sağlayabiliyor.Robotik planlamada fiziksel simülatörler, farklı malzemelerin kuvvete nasıl tepki verdiğini yakalayabilen modellerdir.

Robotlar, deforme olabilen kili karıştırmak/bozmak ya da kili bir kutuya yerleştirmek gibi nesneler ile etkileşimlerin sonuçlarını tahmin etmede “eğitilmiş” modelleri kullanıyor. Fakat geleneksel öğrenme tabanlı simülatörler esas olarak katı nesnelere odaklanır ve sıvıları ya da yumuşak nesneleri idare edemez. Bazı fizik tabanlı simülasyonlar çeşitli malzemeleri manipüle edebilir fakat robotlar çoğunlukla gerçekteki nesneler ile etkileşime girdiğinde hataları ortaya çıkaran yaklaşım tekniklerini temel alıyorlar. Mayıs’ta Uluslararası Öğrenme Temsilleri Konferans’ında sunulan bir bildiride araştırmacılar, farklı malzemelerin küçük parçaları karıştırıldığında veya sıkıştırılıp deforme olduğunda parçacıkların nasıl etkileştiğini öğrenen yeni bir model tanımlamıştır.
Model, hareketin altında yatan fiziğin belirsiz ya da bilinmediği durumlarda doğrudan veriden öğreniyor. Robotlar; katı, sert ve deforme olabilen malzemelerin yanı sıra sıvılara dokunulduğunda oluşan kuvvete nasıl tepki vereceğini tahmin etmek için modeli daha sonra bir kılavuz olarak kullanabilir. Robot nesneler ile etkileşime girerken model, robotun kontrolünün daha hassas olmasına yardımcı olur. Deneylerde “Pirinç Kavraması” veya “Pirinç Tutuşu” olarak adlandırılan iki (2) parmaklı bir robot el,suşi pirinci için hedeflenen görevdeki bir yapılandırmaya doğru (T şekil gibi) deforme olabilen bir köpüğü doğru şekillendirmiştir.Kısacası araştırmacıların modeli, robotlar insanların yaptıklarına benzer şekilde üç boyutlu nesneler oluşturmak için yararlanabilecek bir tür “sezgisel fizik” beyni olarak hizmet ediyor.
Bilgisayar Bilimi ve Yapay Zeka Laboratuvarı (CSAIL) yüksek lisans öğrencisi olan ilk yazar YunzhuLi şunları söylüyor: ” İnsanlarınsezgisel bir fizik modeli var.Bu durumda bir nesneyi itip sıkıştırdığımızda nasıl davranacağını hayal edebiliyoruz. Bu sezgisel modele dayanarak, insanlar mevcut robotların ulaşamayacağı kadar farklı,ilginç manipülasyon görevlerini başarabilirler.Biz insanların yapabildiklerini robotların da yapabilmesi adına bu tür bir sezgisel model oluşturmak istiyoruz.” CSAIL ‘li bir lisans öğrenci olan ortak yazar JianjunWu şöyle söylüyor: “Çocuklar 5 aylıkken katı ve sıvılar için zaten farklı beklentilere ya da kurgulara sahipler. Bu erken yaşta bildiğimiz bir şey ve bu yüzden belki de robotlar için modellememiz gereken bir şey”. Bildiride Lİ ve Wu’ya katılanlar: CSAIL araştırmacısı ve Elektrik Mühendisliği ve Bilgisayar Bilimleri (EECS) bölümünde profesör olan RussTedrake; JoshuaTenenbaum, Beyin ve Bilişsel Bilimler Bölümünde profesör ve CSAIL üyesi ile Beyinler, Zihinler ve Makineler Merkezi (CBMM) üyesi; ve EECS’de profesör olan MIT-IBM Watson AI Lab ‘ın müdürü AntonioTorralba.

Dinamik Grafikler
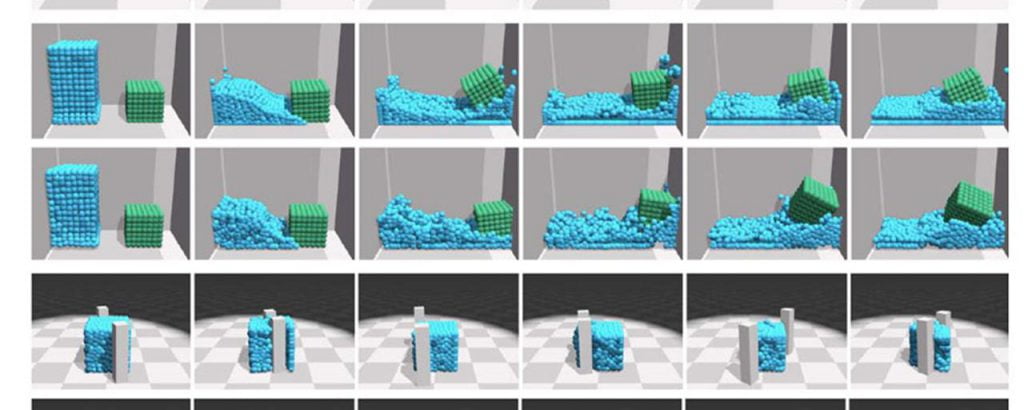
Modelin arkasındaki en önemli yenilik, “parçacık etkileşim ağı (DPI Nets)” olarak adlandırılan ve bu sözde parçacıkların karmaşık davranışlarını yakalayabilen binlerce düğüm ve kenardan oluşan dinamik etkileşim grafiklerini oluşturmak. Grafikteki her düğüm bir parçacığı temsil eder. Komşu düğümler, bir parçacıktan diğerine geçen etkileşimi temsil eden kenarlar kullanılarak bağlanır. Simülatördeki parçacıklar, deforme olabilen bir nesneyi veya bir miktar sıvıyı oluşturmak için birleşen yüzlerce küçük küreden oluşan yapıdır. Bu grafikler, grafiksel sinir ağı olarak adlandırılan bir makine öğrenme sisteminin temelini oluşturur. Eğitimde model, farklı malzemelerdeki parçacıkların nasıl tepki verdiğini ve yeniden şekillendiğini zamanla öğrenir. Daha sonra model, grafik boyunca bir sinyal yayan “yayılma” tekniği olarak adlandırılan kavramdan yararlanır. Araştırmacılar bu tekniği belirli zaman adımlarında partikül konumlarını tahmin eden bir sinyali elde etmek adına her tür malzeme (sert, deforme olabilir ve sıvı) için özelleştirmiştir.
Eğer gerekirse her adımda bu teknik, parçacıkları hareket ettirir ve yeniden bağlar. Örneğin bir kutunun itildiğini düşünelim: kutu içerisindeki bozulan parçacıklar ileri doğru hareket edecektir. Kutudaki tüm parçacıklar birbirine sert bir şekilde bağlı olduğundan nesne içindeki her parçacıkta hesaplama yapıldığında benzer şekilde mesafe, dönme ve diğer boyutta hareket sağlar. Parçacık bağlantıları bozulmamış bir şekildedir ve kutu tek bir birim olarak hareket eder. Fakat deforme olabilen köpüğün bir alanı girintili ise etki farklı olacaktır. İtilmeye maruz kalarak bozulmuş parçacıklar çok fazla ileri hareket ederken çevredeki parçacıklar biraz hareket ederler.Uzaktaki parçacıklar ise hiç hareket etmezler. Sıvı konulmuş bir bardağa çarpıldığında mevcut parçacıklar grafiğin bir ucundan diğer ucuna tamamen sıçrayabilir. Grafik ile, etkilenen tüm parçacıkların nerede ve ne kadar hareket ettiği hesaplanarak tahmin bulunulabilir.
Robotlarda Şekillendirme ve Adapte Etme

Araştırmacılar,sıkıştırma hareketini sağlayabilen iki parmaklı RiceGrip robotunu kullandı ve makalelerinde, deforme olabilen köpüğün dışının hedef şekilleri almasıyla modeli kanıtladılar. Robot ilk olarak köpüğü tanımlamak için derinlik algılayabilen bir kamera ve nesne tanımlama tekniği kullanır. Araştırmacılar, robot tarafından algılanan şeklin yapısındaki parçacıkların başlangıç konumları için şekil içerisindeki parçacıkları rastgele seçmişlerdir.Sonra parçacıklar arasına kenarlar eklenir ve deforme olan malzemeler için özelleştirilmiş dinamik grafiği yeniden yapılandırılır.
Öğrenen simülasyonlar sayesinde robotlar, belirli bir kuvvete sahip her bir dokunuşun grafikteki parçaları nasıl etkileyeceği hakkında zaten iyi bir fikir veriyor. Robot robot köpüğü sıkıştırmaya başladığında parçacığın gerçekteki konumu ile hedeflenen konumunu iterasyon yaparak (tekrar etme) eşleştirir. Parçacıklar sıralanamadığı zaman modele bir hata sinyali gönderilir. Bu sinyal malzemenin gerçekteki fiziğine daha iyi uyması adına modeli değiştirmektedir. Araştırmacılar; robotların kısmen gözlemlenebilir senaryolar ile etkileşimleri daha iyi tahmin etmelerine yardımcı olacak modeli geliştirmeyi hedefliyor. Sadece yüzeydeki kutular görünüp diğer kutular gizlenmiş olsa bile, kutu yığını itildiğinde nasıl hareket edeceğini bilmek gibi bir senaryo bu modele örnek olabilir.
Araştırmacılar doğrudan görüntüler üzerine çalışarak modeli baştan sona algı modülü ile birleştirmek için de çalışmalarını sürdürmekte. Bu, Dan Yamins grubu ile ortak bir proje olacak. Yamin, MIT ‘de kısa bir süre önce doktorasını tamamladı ve şuan Stanford Üniversitesi’nde yardımçı doçent. Wu, “İlgilendiğimiz konu üzerine birtakım araştırma ve bilgi mevcut. Bu bilgiyi arttırmak adına çalışıyoruz.” diyor. “Modelimizin şuan sadece küçük bir kısmını görebiliyoruz fakat tüm parçacıklarının dinamiklerin öğrenmek için modelimizi genişletiyoruz.” [ Bilim İnsanları, Elimizin dokunma hissiyatını taklit eden eldiven geliştirdi]
Çeviri: Aybike Pirol
Kaynak: http://news.mit.edu/2019/robots-object-manipulation-particle-simulator-0417